Chào bạn,
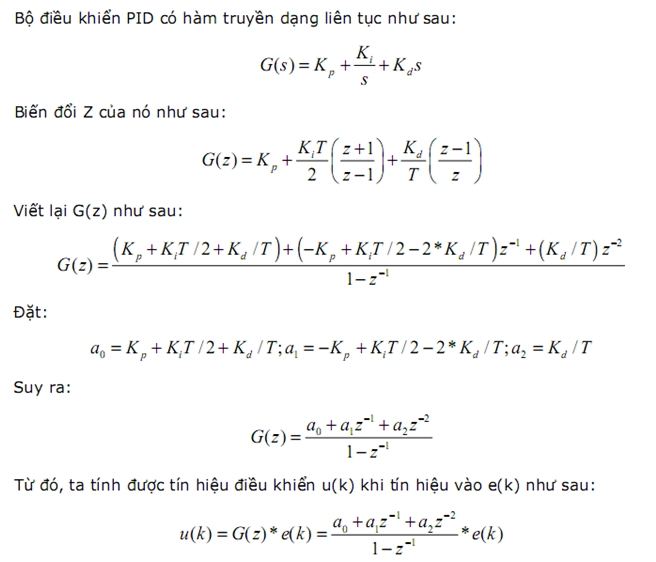
Ở trên mình còn thiếu công thức tính cuối cùng:
u(k) = u(k-1) + a0*e(k) + a1*e(k-1) + a2*e(k-2). Thông qua việc chọn T, Kp, Ki, Kd thì ta dùng công thức này điều khiển.
Cái mình muốn hỏi là T được tính dựa vào đâu, hồi trước làm mình cho đại T = 1 luôn nên không biết Kp, Ki, Kd chính xác có giá trị là bao nhiêu, giờ thì mình muốn biết chính xác những giá trị này.
Bạn nói mình không hiểu lắm, như bạn nói thì T là chu kì đọc từ cảm biến hồi tiếp về hay là chu kì tính toán PID trong MCU.
Cám ơn bạn.