Nguyễn Thanh Tâm
Trứng gà
Chào các bạn,
Tình hình là có vài bạn muốn làm đề tài liên quan đến điều khiển động cơ, mình sẽ tản mạn nhanh gọn ăn liền về nó
1. PWM là gì? Tại sao cần nó?
Nhanh gọn và có tâm, mình trích dẫn 2 bài có vẻ là dễ hiểu hơn những thứ mình đã nói trên lớp arduinovn và wiki
arduinovn và wiki
Tóm lại, sau khi đọc 2 link trên chúng ta biết nó có tồn tại và lý do giữ e nó ở lại:

Trích thêm một tấm hình từ một con driver đắt tiền của TI cho có 1 tí clearly. Theo biểu đồ, Efficiency đạt cực đại ở khoảng 50Khz và giảm dần khi tần số lên cao.
Vậy chúng ta nên chọn tần số như thế nào là hợp lý? Câu trả lời có thể đã quá quen thuộc: down và mở datasheet của cầu H bạn đang sử dụng ra, quá đơn giản phải không nào
Câu trả lời có thể đã quá quen thuộc: down và mở datasheet của cầu H bạn đang sử dụng ra, quá đơn giản phải không nào
Tuy nhiên, theo như kinh nghiệm của các bậc đi trước truyền cho các thế hệ đi sau, để tránh các bug không cần thiết thì tần số 20Khz thường được sử dụng.
Khi thay đổi chu kỳ xung, chúng ta thay đổi trược giá trị trung bình của áp va dòng vào tải.
 công suất trên là công suất điện và nó có liên quan tới công suất cơ học của động cơ theo công thức bla bla gì đó
công suất trên là công suất điện và nó có liên quan tới công suất cơ học của động cơ theo công thức bla bla gì đó 
OK có vẻ mọi người đã có thể hiểu được thứ chúng ta cần hiểu.
Quay lại với MSP430G, chúng ta có thể tạo pwm từ đây
2. Cầu H
Tiếp tục thay thế những lời nói khó hiểu trên lớp, link tiếp theo và tiếp nữa
và tiếp nữa
Những thứ cần đọng lại:
Gọi là cầu H vì sơ đồ của nó giống chữ H.

Cá nhân mình thì chả thấy giống chữ H ở chỗ nào cả, đáng ra nó phải là cầu 8, nhìn giống số 8 hơn nhiều tóm lại các bạn cần nhớ được sơ đồ của nó.
tóm lại các bạn cần nhớ được sơ đồ của nó.
Hai trạng thái đóng mở của các công tắc cần quan tâm là:
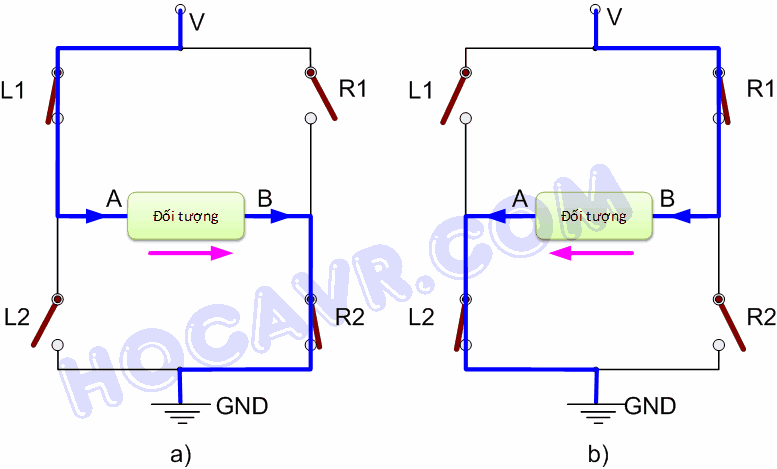
Mà thôi các bạn nhìn hình đi, mình lười quá Trong 2 trường hợp, luôn có 2 công tắc cùng đóng và 2 công tắc còn lại cùng mở. Để chuẩn bị cho nội dung phía dưới, tạm gọi cặp công tắc (L1 R2) là SW1, (R1 L2) là SW2. Gom lại 1 chuyện là nhờ vào cầu H chúng ta có thể đổi chiều dòng điện qua động cơ, thế thì chúng ta có thể đổi chiều động cơ, cuộc sống quá đơn giản. Kết hợp với PWM truyền vào các công tắc của cầu H, ta có thể điều tốc và chiều của động cơ.
Mà quên nữa, tại sao cần cầu H và lái FET, BJT phức tạp vậy? sao không dùng điện thẳng từ VDK chọ đơn giản? Bạn nào muốn đốt vdk thì làm rồi sẽ biết nhé
Bạn nào muốn đốt vdk thì làm rồi sẽ biết nhé  mình thích vậy nên mình k giải thích đâu
mình thích vậy nên mình k giải thích đâu 
Qua 2 cái trên, rõ ràng toàn là lý thuyết. Để đổi gió, chúng ta tiếp tục nói về lý thuyết khác
Giới thiệu L298: Mạch gồm 2 cầu H A và B và mấy chân liên quan

Tra google là ra đầy ngay, cách dùng con này cũng muôn màu, cá nhân mình xài con này được mấy lần lần nên biết được 2 cách.
Cách 1: xét cầu A, chúng ta có 2 chân IN1 và IN2 ứng với SW1 và SW2 đã đề cập ở trên, vậy khi điều khiển chúng ta cần kích pwm vào 1 chân IN, cái còn lại kéo về tráng thái 0. Để có chiều ngược lại ta đổi PWM kích sang IN kia. Quá đơn giản tương tự với cầu B.
Cách 2: Chúng ta tháo jump ra và đưa pwm vào chân enable A, được hiểu như là cho phép cầu A chạy, do pwm đưa vào coi như là nguồn qua cầu H đã có thể điều chỉnh, trong trường hợp này các chân IN1 và IN2 giữ vai trò điều chỉnh hướng)")
Mình nghĩ bài này được viết lúc mình vừa tỉnh dậy sau một đêm chả ngủ được gì nên rất là dễ hiểu. Bạn nào không hiểu có thể đọc lại từ đầu nhé, loop đến khi nào hiểu rồi thôi.
Tình hình là có vài bạn muốn làm đề tài liên quan đến điều khiển động cơ, mình sẽ tản mạn nhanh gọn ăn liền về nó
1. PWM là gì? Tại sao cần nó?
Nhanh gọn và có tâm, mình trích dẫn 2 bài có vẻ là dễ hiểu hơn những thứ mình đã nói trên lớp
arduinovn và wikiTóm lại, sau khi đọc 2 link trên chúng ta biết nó có tồn tại và lý do giữ e nó ở lại:
Hai thứ cần quan tâm về nó là:việc sử dụng chính của nó là cho phép điều khiển nguồn điện cung cấp cho các thiết bị điện, đặc biệt là để tải quán tính như động cơ.
Trong điều khiển động cơ, tần số quá thấp sẽ làm động cơ giật và không ổn định, tần số quá cao làm giảm hiệu suất của cầu H hoặc có thể cháy cả cầu do đóng cắt quá nhanh.Đại lượng đặc trưng cho 1 xung PWM (Pulse Width Modulation) bao gồm tần số (frequency) và chu kì xung (duty cycle).
Trích thêm một tấm hình từ một con driver đắt tiền của TI cho có 1 tí clearly. Theo biểu đồ, Efficiency đạt cực đại ở khoảng 50Khz và giảm dần khi tần số lên cao.
Vậy chúng ta nên chọn tần số như thế nào là hợp lý?
Câu trả lời có thể đã quá quen thuộc: down và mở datasheet của cầu H bạn đang sử dụng ra, quá đơn giản phải không nàoTuy nhiên, theo như kinh nghiệm của các bậc đi trước truyền cho các thế hệ đi sau, để tránh các bug không cần thiết thì tần số 20Khz thường được sử dụng.
Khi thay đổi chu kỳ xung, chúng ta thay đổi trược giá trị trung bình của áp va dòng vào tải.
Trị trung bình của dòng và áp ảnh hưởng đến công suất của tải theo công thức abc=xyz gì đấy đã được học
công suất trên là công suất điện và nó có liên quan tới công suất cơ học của động cơ theo công thức bla bla gì đó OK có vẻ mọi người đã có thể hiểu được thứ chúng ta cần hiểu.
Quay lại với MSP430G, chúng ta có thể tạo pwm từ đây
2. Cầu H
Tiếp tục thay thế những lời nói khó hiểu trên lớp, link tiếp theo
và tiếp nữa Những thứ cần đọng lại:
Gọi là cầu H vì sơ đồ của nó giống chữ H.
Cá nhân mình thì chả thấy giống chữ H ở chỗ nào cả, đáng ra nó phải là cầu 8, nhìn giống số 8 hơn nhiều
tóm lại các bạn cần nhớ được sơ đồ của nó.Hai trạng thái đóng mở của các công tắc cần quan tâm là:
Mà thôi các bạn nhìn hình đi, mình lười quá
Trong 2 trường hợp, luôn có 2 công tắc cùng đóng và 2 công tắc còn lại cùng mở. Để chuẩn bị cho nội dung phía dưới, tạm gọi cặp công tắc (L1 R2) là SW1, (R1 L2) là SW2. Gom lại 1 chuyện là nhờ vào cầu H chúng ta có thể đổi chiều dòng điện qua động cơ, thế thì chúng ta có thể đổi chiều động cơ, cuộc sống quá đơn giản. Kết hợp với PWM truyền vào các công tắc của cầu H, ta có thể điều tốc và chiều của động cơ.Mà quên nữa, tại sao cần cầu H và lái FET, BJT phức tạp vậy? sao không dùng điện thẳng từ VDK chọ đơn giản?
Bạn nào muốn đốt vdk thì làm rồi sẽ biết nhé mình thích vậy nên mình k giải thích đâu Qua 2 cái trên, rõ ràng toàn là lý thuyết. Để đổi gió, chúng ta tiếp tục nói về lý thuyết khác
Giới thiệu L298: Mạch gồm 2 cầu H A và B và mấy chân liên quan
Tra google là ra đầy ngay, cách dùng con này cũng muôn màu, cá nhân mình xài con này được mấy lần lần nên biết được 2 cách.
Cách 1: xét cầu A, chúng ta có 2 chân IN1 và IN2 ứng với SW1 và SW2 đã đề cập ở trên, vậy khi điều khiển chúng ta cần kích pwm vào 1 chân IN, cái còn lại kéo về tráng thái 0. Để có chiều ngược lại ta đổi PWM kích sang IN kia. Quá đơn giản
tương tự với cầu B.Cách 2: Chúng ta tháo jump ra và đưa pwm vào chân enable A, được hiểu như là cho phép cầu A chạy, do pwm đưa vào coi như là nguồn qua cầu H đã có thể điều chỉnh, trong trường hợp này các chân IN1 và IN2 giữ vai trò điều chỉnh hướng
Mình nghĩ bài này được viết lúc mình vừa tỉnh dậy sau một đêm chả ngủ được gì nên rất là dễ hiểu. Bạn nào không hiểu có thể đọc lại từ đầu nhé, loop đến khi nào hiểu rồi thôi.
Last edited: