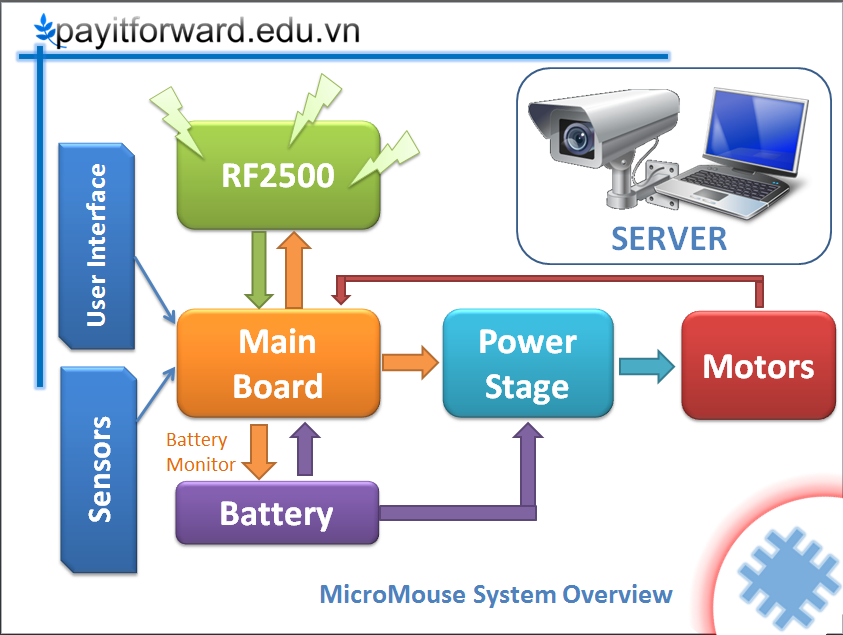
Chiều nay 09/08/2013 các nhóm đã có mặt để tham dự buổi Training đầu tiên về Hardware, trong buổi này các nhóm được giới thiệu sơ đồ các mạch điều khiển và công suất của Robot MicroMouse, các chức năng, hoạt động của mạch.
Tài liệu buổi 1:
https://dl.dropboxusercontent.com/u/76451053/RYA2013_TrainingDocs_Course1_Hardware.rar
Trong tài liệu này:
1. Slide sử dụng chiều nay.
2. Toàn bộ các schematic, PCB của Micromouse (PDF files).
3. Datasheet TPS61175 và DRV8412 (có thể download thêm các tài liệu các về IC này trên ti.com).
Chiều mai, 10/08 các nhóm sẽ có buổi Training thứ 2 về Firmware (Phần Software được lùi lại sau).
(Phần Software được lùi lại sau).
Tài liệu buổi 1:
https://dl.dropboxusercontent.com/u/76451053/RYA2013_TrainingDocs_Course1_Hardware.rar
Trong tài liệu này:
1. Slide sử dụng chiều nay.
2. Toàn bộ các schematic, PCB của Micromouse (PDF files).
3. Datasheet TPS61175 và DRV8412 (có thể download thêm các tài liệu các về IC này trên ti.com).
Chiều mai, 10/08 các nhóm sẽ có buổi Training thứ 2 về Firmware
(Phần Software được lùi lại sau).